 |
 |
|
 |
|
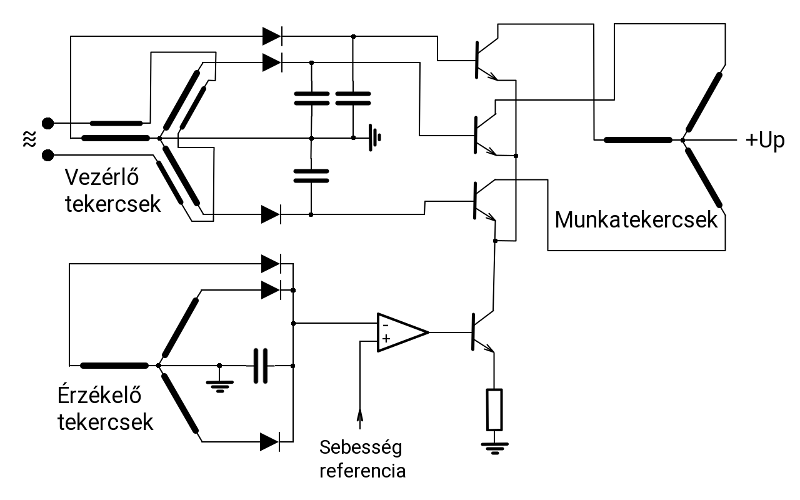
Az eredeti meghajtóáramkör egyszerűsített vázlata látható ezen az ábrán. A neten elérhető részletesebb kapcsolási rajz, nyomtatott áramkör, és minden ami ezzel kapcsolatos. A lényeget azért leírom: A legérdekesebb része talán a "vezérlő tekercs"-nek nevezett rész. Megtekinthető a gyakorlatban ezen a képen (középen 3x2 kis tekercs). Feltételezem, hogy a Hall cella akkoriban drága lehetett, ezért alkalmazták ezt a megoldást. Ez három kis transzformátor, aminek a csatolási tényezőjét (és az induktivitását is) változtatja egy kis lágyvas forgórész, méghozzá a munaktekerccsel azonos fázisban. Egy oszcillátor hajtja meg kb 40 kHz frekvenciával és egyenirányítás után kb 1-2 Volt jelet kapunk. Ez választja ki a három tranzisztor segítségével hogy melyik tekercs kapja az áramot. A jelek ezen a képen láthatóak (egy fázis a háromból). Fontos, hogy ez a megoldás álló helyzetben is működik - ami szükséges az induláshoz. Alul az érzékelő (visszacsatoló) tekercsek a fordulatszámmal arányos feszültséget állítanak elő amit egy referenciafeszültséggel összehasonlítva szabályozza a munkatekercsre kerülő áramot. A referencia egyrészt kapcsolható (45 illetve 33 1/3 fordulatszám), másrészt kis potival finoman állítható. A fordulatszám eltérése a stroboszkópon látszik, kézzel állítandó pontos értékre. |
|
|
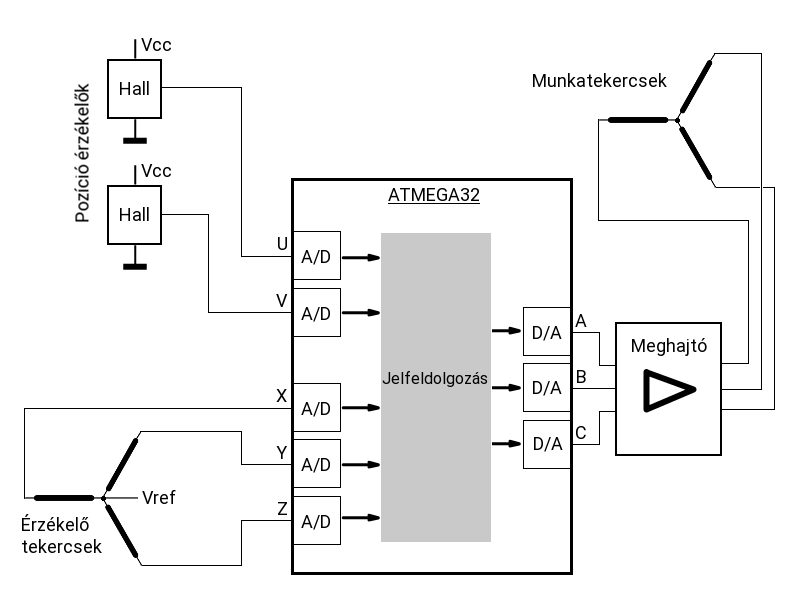
Az új, mikroprocesszoros motorvezérlő egyszerűsített rajza. Itt nincs sok magyaráznivaló, a lényeg az, hogy mindent A/D konverteren keresztül közvetlenül mér a szoftver, és a beavatkozás ugyancsak közvetlenül D/A konvertereken keresztül történik. Az összes funkció így szoftverben lett megvalósítva, a részletes leírásuk lejjebb található. A hardver tulajdonképpen nem is lett bonyolultabb az eredetinél, mivel minden fontos funkció szoftverbe került. Ez így elég rugalmas megoldás, könnyen ki lehet próbálni különböző módszereket. A forrás letölthető innen vagy a git paranccsal: git clone git://git.code.sf.net/p/dd-motor-2/code dd-motor Kb 2600 sor C++ nyelven írt kód - ha nem számítom a felhasznált könyvtárak forrását. Érdekes, hogy egy ilyen pici (8 bites) processzor mindent lebegőpontosan számolva (32 bit float) 1 kHz feletti mintavételezési frekvenciát tud - pedig a műveletek nem egyszerűek, pl mátrixszorzás, szögfüggvények, stb. A memóriaigény kb 20 kB ROM és 1.5 kB RAM. |
|