 |
 |
|
 |
|
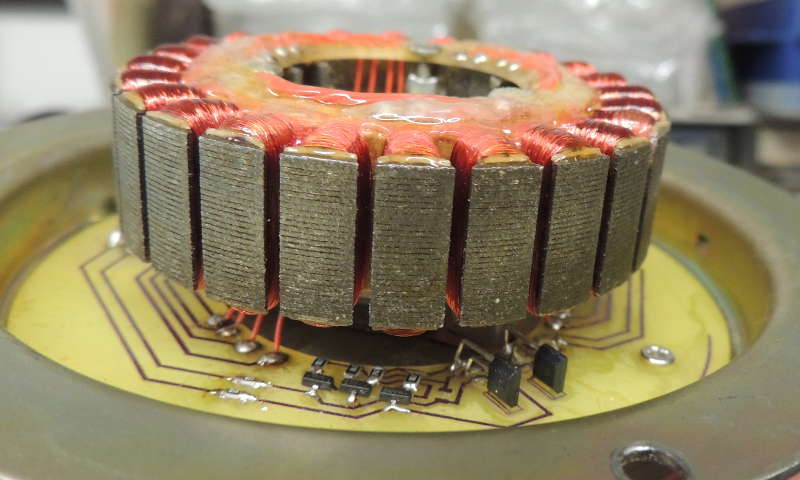
Itt látható az eredeti motor. Tizenhat pólusú, három fázisú szinkronmotor. Mi is volt vele a baj? Ezek a fő problémák:
|

|
| A motor eredetileg a műanyag házra volt rögzítve. Mivel a hangkar is ugyanezen a felületen van, a motor rezgései akadálytalanul eljuthatnak a fejhez. |

|
| A motort célszerű szilárdan rögzíteni a nagy tömegű alaphoz, így a rezgéseket jó csillapítja. |

|
|
Jobb oldalon látható a gyári tekercselés képe. A legnagyobb baj vele a lenti táblázatban látható aszimmetria: a tekercsek adatai elég nagy szórást mutatnak. Ezen kívül
a tekercsek nincsenek rögzítve, így a vezetékekre ható erő is okozhat zajt. Ráadásul vas alkatrész is van a tekercsbe dugva (a képen látható kis lemez), ami nekem a
kísérletek közben néha jól hallható zörgést produkált. Egy lemezjátszó motorjában ilyesmi nem megengedhető. Középen még látható 3x2 kis tekercs: ezek szolgáltatták a vezérlőjeleket eredetileg. Ezek helyett én Hall cellákat alkalmaztam (lásd itt). |

|
||||||||||||||||||||||||||||||||
|
A gyári tekercselés egy fázisa (a háromból), annak is a munkatekercse látható a jobb oldali ábrán. Az egy tekercs által keltett mágneses tér is látható, hogy össze lehessen hasonlítani
az új tekercselési megoldással (lásd lejjebb). Érdekes megoldás, hogy a vasmagnak két szegmensére van a drót tekerve: ezt valószínűleg gyártástechnológiai megfontolásból készítik így. A következő ábrán (lejjebb) látszik, hogy a gerjesztett mágneses tér ugyanolyan, mintha egy szegmensen lenne a tekercs, viszont így a tekercselés előre elkészíthető és egy mozdulattal felhelyezhető a vasmagra ami gyártási költség szempontjából előnyös. Más szempontból viszont nem: a tekercsek így nem lesznek egyformák (beül/középen/kívül mások a paraméterek). Az előző ábrán látható az elhelyezés tényleges megoldása. Még egy érdekesség: fele annyi pólus van az állórészen, mint első ránézésre kéne. Ez nem véletlen, és ez is a motor egyenletes járását hivatott biztosítani. Az ábrán is látszik, hogy ha a mágnes egyik pólusa az állórész tekercsével szemben áll, akkor a másik pólus éppen két tekercs között van. Ezzel a két pólus által keltett egyenetlenség kiegyenlíthei egymást. |

|
||||||||||||||||||||||||||||||||
| Az új tekercselés egy fázisa látható itt, az előző ábrához hasonlóan. Ez nehezebben kivitelezhető mint a gyári megoldás, de jobb paramétereket ad. Kézzel feltekerni pedig igazi türelemjáték - de nekem megérte. Az ábrán a mágneses erővonalak láthatók ami azonos a gyári megoldással, a tekercs más kivitelezése ellenére. |

|
||||||||||||||||||||||||||||||||
| Itt már mindhárom fázis látható, így a forgó mágneses tér kialakítása már követhető. Megjegyzendő, hogy a munkatekercs és a visszacsatoló tekercs ugyanilyen elrendezésű, csak különböző átmérőjű huzalokkal készül, párhuzamosan vagy egymásra tekercselve. |

|
||||||||||||||||||||||||||||||||
|
Az új tekercselés képe. Az egész impregnálva lett uretán lakkal, ami védi a vékony vezetéket a sérüléstől és a vezetékek elmozdulsát is akadályozza amivel a zajt hivatott csökkenteni. A tekercsek alatt két Hall cella került elhelyezésre. Ezekre azért van szükség, mert álló helyzetben nem indukálódik feszültség a tekercsekben, ezért a vezérlőáramkör nem tudja hogyan kell elindulni. A Hall cellák statikusan működnek, viszont nem adnak elég szép jelet a vezérléshez, ezért csak indulásnál használatosak. Habár a motor három fázisú, elegendő belőlük kettő is (kb 90 fok fázistolásban elhelyezve), mert a szoftver ki tudja számolni a három fázisú vezérlést. |
|
||||||||||||||||||||||||||||||||
| A motornak két azonos menetszámú, de különböző drótvastagságú tekercse van: egy munkatekercs (vastagabb) és egy érzékelő tekercs (vékonyabb). A jobb oldali táblázat a munkatekercs (vastagabb drót) adatait tartalmazza (három fázis) a gyári és a módosított tekercselésre. Látható, hogy az új tekercselés kisebb eltérést mutat a tekercsek között. Ez azért fontos, mert a három tekercs által képviselt erővektornak ki kell egyenlíteni egymást (vagyis az eredőjük egy egyenletes nyomaték kell legyen). Ha a tekercselés aszimmetrikus, akkor több zaj keletkezik a motor forgása közben. |
|
||||||||||||||||||||||||||||||||
|
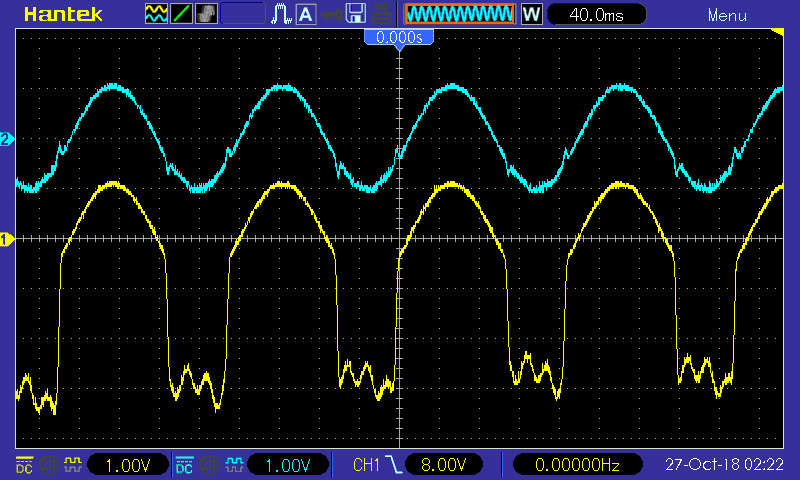
Az eredeti meghajtóáramkör jelei a motor tekercsein, 33 1/3 fordulatnál. Az alsó görbe a meghajtótekercs, a felső pedig a visszacsatolótekercs feszültsége. A három fázisból egy látszik, a másik kettő hasonló, értelem szerint 120 fokos eltolással. A munkatekercsen látható ugrás a meghajtóáramkör jele, alul még a rosszul szűrt tápegységből jövő brumm is látszik. Azt hiszem, hogy nem kell hosszasan magyarázni, hogy miért kelt ez a meghajtójel zavarokat: a hirtelen ugrás a tekercs áramában ennek megfelelő ugrást jelent a mágnesre ható erőben is. Habár a mellette levő tekercs árama ellentétesen ugrik, a keletkező erők nem esnek egy irányba, tehát nem egyenlítik ki egymást. |
|
|
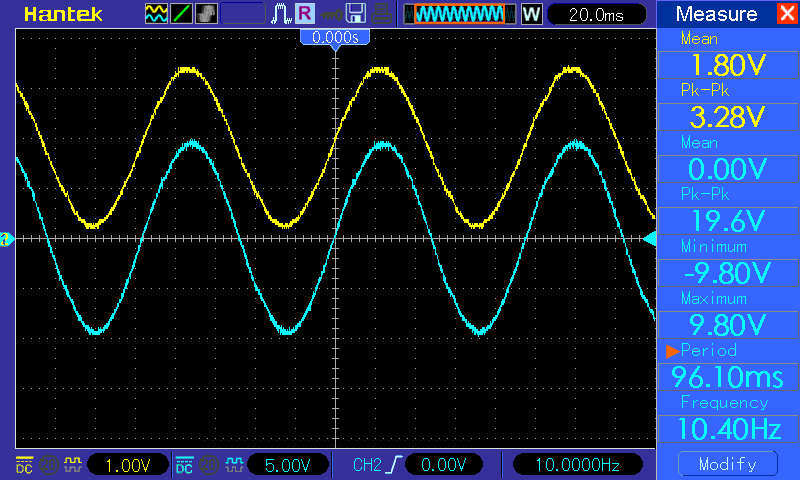
Az általam készített meghajtó áramkör jelei. A felső ábra itt is a visszacsatoló tekercs, az alsó pedig a munkatekercs (habár a színek itt fordítva vannak). Ez is egy fázis a három közül, és itt is 120 fok a fázisok közötti szögeltérés.
A színuszos meghajtás azt eredményezi, hogy a három tekercs által keltett erő úgy adódik össze, hogy csak forgatónyomaték lesz az eredő erő - persze feltételezve, hogy a rendszer mechanikusan és elektromosan is szimmetrikus (lásd lejjebb
az ehhez szükséges módosításokat). Mérési eredmények is mutatják (lásd ezen az ábrán) a meghajtó jel minőségét. Ez a mérés 78 RPM fordulatnál történt (az eredeti áramkör nem is tudott ilyent), de más fordulatszám is hasonló ábrát mutat. A mérőtekercs jele DC eltolást kapott (1.8V) mert egy A/D konverter bemenetére megy, ami 3.6V referenciafeszültséggel mér. Ebből számítja a processzor a meghajtó jelet. Az teljes leírást lásd itt. |
|
| Az eredeti csapágyazás képe látható jobb oldalon. Egyszerű, szokásos felépítés: bronz siklócsapágy, alul műanyag talppal. Habár a bronz grafitkenésű, a zaja nem elhanyagolható (hallható is egy csendfelvételen, lásd az oldal alján). Az alul levő talp is nehéz eset: nem egyszerű a zaját csökkenteni. Próbálkoztam kemény és puha anyagokkal (acél golyó, teflon, gumi, műanyag, stb), de nem sikerült jó eredményt elérnem, ezért fejlesztettem ki az alább részletezett mágneses felfüggesztést - amivel nemhogy csökkentettem, de meg is szüntettem ennek az alátámasztásnak a zaját. |

|
|
Mivel csak egy függőleges erőt kell megtartani (oldalirányban a csúszócsapágy tart), az elv nem bonyolult: két, azonos mágneses pólus taszítja egymást, méghozzá csökkenő távolság esetén
növekvő erővel. Ez optimális erre a feladatra, tehát a terv a következő: ragasszunk egy henger alakú mágnest a tengely végére, és tegyünk alá egy másikat úgy, hogy taszítsák egymást. Csak egy probléma van: a tengely átmérője 7 mm, és sajnos még egy neodymium mágnes sem tudja megtartani a szükséges erőt ekkora méretben. Sajnos nem tehetek rá ennél szélesebb mágnest, mert akkor meg nem tudom kihúzni a perselyből. A mágnes hosszának növelése nem növeli a taszító erőt, mert a mágneskör hossza is növekszik vele. Ki kell tehát valami mást találni, ami a következő ábrán látszik. |

|
|
A tengelyvég kinagyított képe látszik az ábrán. Az emelő erőt úgy sikerült megnövelni, hogy több kis mágnest ragasztottam a tengely végére, egymással szemben. Kissé macerás fölragasztani,
mert erősen taszítják egymást, ráadásul pontosan kell pozícionálni, mert a mágneseknek át kell tudni csúszni a perselyen. Szerencsére a persely bronzból készült, és így használható sablonként
a ragasztáshoz - csak arra kell erősen ügyelni nehogy beleragadjon a tengely. Az ábrán a maximális emelő erő pozíciója látható: ennél magasabb vagy alacsonyabb helyzetben is csökken az erő. Ezért célszerű egy ütközőt elhelyezni erre a pozícióra (az ábrán nem látható), mert ha leesik a tengely ez alá, akkor nincs ami visszaemelje. Az alkalmazott mágnesek mérete (D=7mm tengely esetén):
Az eredmény egész jó lett: nem kell sokat magyarázni, hogy egy ilyen megoldás forgás közben semmi zajt nem termel. Persze az egyéb alkatrészek még zajosak, de legalább ez a zajforrás kiesett. |

|
|
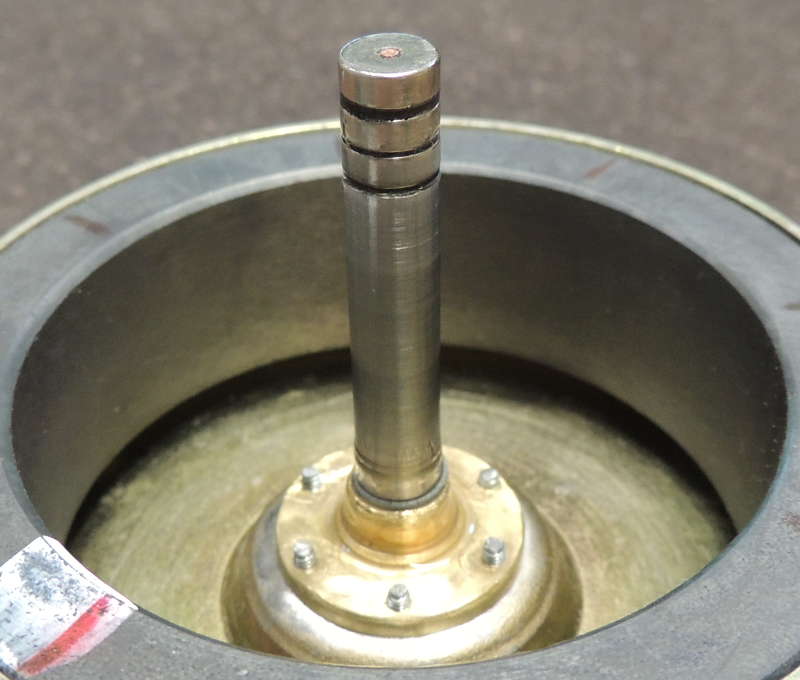
Ugyanez a gyakorlatban megvalósítva. A mágnesek közepén kis lyuk van (1.5mm) amibe egy réz vezeték lett beragasztva, ez is segíti a központosítást és javítja a ragasztás megbízhatóságát. Középen a rögzítőcsavarok is láthaók, aminek a funkciója a centírozás leírásában olvasható. |
|
|
A jobb oldali kép két felvételből tevődik össze: a gyári forgórész (külső mágnesgyűrű) 180 fokos elfordításával (alulnézet). Látható rajta hogy excentrikus: a légrés jelentősen változik forgás közben.
Tehát a két szemben lévő pontra ható erők jelentősen különböznek - aminek egyébként ki kéne oltaniuk egymást. Az eredőjük így a tengelyre merőleges nemkívánatos erő ami a forgás zaját növeli. A következő képekkel bemutatom hogyan sikerült központosítani. |

|
|
Eredetileg egy bronz közdarab segítségével rögzítették a mágnest a tengelyre, ahogy a jobb oldali képen is látható (felülnézet). A bronz közdarabra peremezéssel van rögzítve a mágnes, amit leköszörültem, így a mágnes eltávolítható. |

|
|
Mivel a mágnes pontosan illeszkedik a bronz tartóra, a benne lévő lyukat kicsit ki kell tágítani (megint köszörüléssel) hogy el tudjon mozdulni egy kicsit (kb 1/2 mm szükséges).
A képen látható is a kis hézag. A bronz közdarabba 6 db lyukat fúrtam, és bele menetet vágtam (M2 méret). Alulnézetben egy másik képen látható. Ezután következik a legnehezebb rész: pontosan fel kell helyezni a mágnest. Ezt úgy értem el, hogy vékony papírból annyit tekertem a vasmagra, hogy szoruljon rajta a mágnes, majd rátoltam. Így a papír egyenletes hézagot tart a vas és a mágnes között, annak ellenére, hogy elég nagy erő alakult ki köztük. Ezután csak meg kell húzni a csavarokat, majd a mágnes lehúzása után a papír eltávolítható, és készen is vagyunk. |

|
|
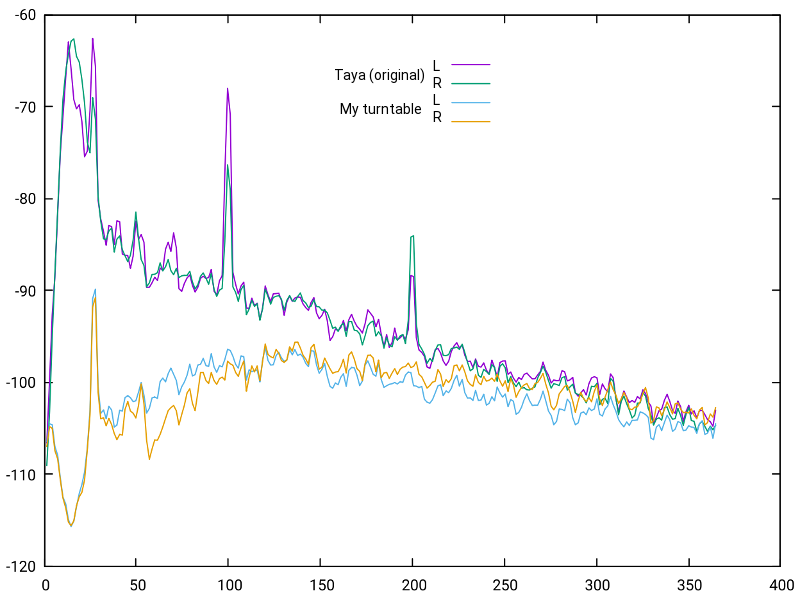
Ezen az ábrán csönd felvétel ("Silent Track") spektruma látható (Ortofon Pick Up Test Record 2), annak is az alacsonyabb frekvenciájú tartománya. A magasabb részt levégtam, mert ott
gyakorlatilag nincs változás az itt említett hardver módosítások miatt. Jól elkülöníthető az eredeti (Taya DP510) és a saját készítésű eszközzel készült felvétel görbéje (mindkettőnek van külön
bal/jobb csatornája). A 26 Hz csúcs a motor által generált zaj: itt több mint 20 dB javulás látható. A 26 Hz fölötti rész főleg a csapágyazás zaja, ott is jelentős csökkenés látható: az alján kb 20 dB, följebb csökken a különbség. A 20 Hz alatti tartomány már kevésbé érdekes, mert itt egy aktív szűrő is csökkenti a zajt, ezért a jóval nagyobb különbség. Persze ez is fontos, de ez már nem csak ennek a hardvernek köszönhető. Megjegyzendő még a 100 és 200 Hz csúcs: ez a Taya hálózati trafójának mechanikus eredetű zavaró jele, és az új felvételen egyáltalán nem látszik. |
|